My name is Bo Zhang (张博). I received the Ph.D. degree in School of Electronics and Computer Science, University of Southampton, Southampton, U.K., in 2015, supervised by Professor Lajos Hanzo and Dr. Mohammed El-Hajjar. I am now an assistant professor in State Key Laboratory of High Performance Computing. I am working on signal processing and protocol design in wireless-connected robotic networks in Morphable, Intelligent and Collective Robot Operating system (micROS) project.
More information at
Research Highlights
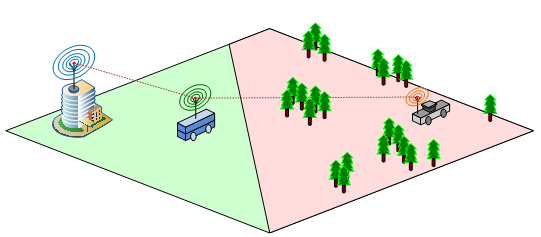
Recent years have witnessed the evolution of robotics and great industrial and academic efforts for the upcoming “robotic era”. As the robots interact with the physical and social environments, considerable research contributions have been devoted to robotic sensing, cognition, motion/path planning and control. Naturally, the observation and control information needs to be shared for various purposes such as surveillance in a remote area or serving in a smart house.
In order to support consensus and cooperation for multi-robot system, wireless communications and networking have become an indispensable part of the infrastructure. Therefore, the robotic networks are very likely to be incorporated into the next-generation communication networks e.g. the Internet of things (IoT). Although the fifth-generation (5G) cellular networks have promoted substantial research efforts on machine-to-machine (M2M) communications and smarter devices, the intelligence embraced by the robots have not been fully exploited in designing wireless-connected robotic networks, especially when the robots are task-oriented, autonomous and energy-constrained.
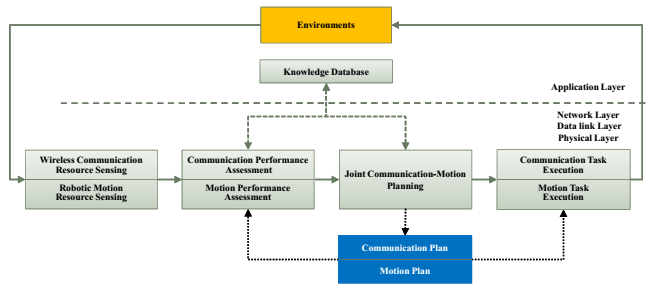
Therefore, we propose a concise architecture for incorporating communication-planning in mobile robotic systems, according to the observe-orient-decision-action (OODA) cognitive model. We highlight the joint communication-motion planning (JCMP) module and compare it with conventional communication-planning and motion-planning, where the necessity of the JCMP is validated via both theoretical analysis and simulation results of an illustrative example.
There are a series of open problems, hence we have been working on these in order to fill the gap between the state-of-the-art and a fully operational wireless-connected autonomous robotic networks.
For more details in JCMP, please find in our latest survey available at http://arxiv.org/abs/1511.02299 or download from this page.